Hua-Hsuan Liang
I recently graduated with an M.S. in Computer Science from Columbia University, where I worked as a research assistant in the ROAM Lab mentored by Zhanpeng He.
My research focuses on robotics and machine learning,
with a particular emphasis on reinforcement learning, imitation learning,
and human-in-the-loop learning for robotic manipulation.
A central theme of my work is developing learning methods that operate under limited, noisy, or subjective supervision,
which is a common challenge in real-world robotics.
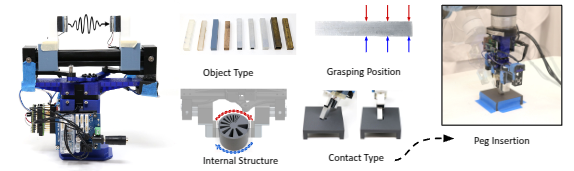
During my graduate studies, I worked on reinforcement learning from human feedback (RLHF) for robotic manipulation and applied these methods in SpikeATac, a multimodal tactile sensing system for dexterous manipulation. In this project, I studied how sparse human preference labels and qualitative feedback can be used to train critic models and fine-tune manipulation policies beyond demonstration-based learning. My work involved designing RLHF training pipelines, integrating learned critics into reinforcement learning loops, and evaluating policy improvement in contact-rich manipulation tasks.
Before joining Columbia, I earned my undergraduate degree in Computer Science and Information Engineering from National Cheng Kung University, Taiwan. For my capstone project, I was advised by Professor Yeim-Kuan Chang. After graduating, I spent a year conducting research at DCNLab, where I was advised by Professor Chuan-Ching Sue.
I am currently preparing to pursue a Ph.D. and am seeking research opportunities focused on robot learning, RLHF, and data-efficient manipulation. Feel free to reach out if you would like to connect or discuss my work.
Research Interests: Robotics, Machine Learning
Location: New York, NY
Updates
- [Oct 2025] I presented my poster "A Multimodal Tactile Finger with Taxelized Dynamic Sensing for Dexterous Manipulation" at NERC 2025.
- [June 2025] Served as a delegate reviewer for a submission to IEEE Robotics and Automation Letters (RA-L).
- [May 2025] Appointed as a Course Assistant for the Artificial Intelligence course at Columbia University.
- [Sep 2024] Joined Columbia University, ROAM Lab as a research student.
- [Sep 2023] Started as a Research Assistant at DCNLab.
- [July 2023] Interned as an Equipment Intelligence Intern at Lam Research TW.
Publications
SpikeATac: A Multimodal Tactile Finger with Taxelized Dynamic Sensing for Dexterous Manipulation
Eric T. Chang*, Peter Ballentine*, Zhanpeng He*, Do-gon Kim, Kai Jiang, Hua-Hsuan Liang, Joaquin Palacios, William Wang, Ioannis Kymissis, Matei Ciocarlie
ICRA 2026 | Website | Paper | WSJ Coverage
Project

ScaleableResourceForDocker
Using Deep Reinforcement Learning to deal with computational resource scaling problems


Awards
